

徳永 剛准教授
研究室
(キーワード:レーザー・メカトロニクス)
当研究室では主にレーザの応用に関して(1)レーザ加工,(2)レンズシステム,(3)光応用計測と,レーザを使わない(4)メカトロニクス応用機器開発の4つの分野について研究しています.
(1) レーザ加工に関する研究

図1 真空チャンバ内の造形装置
光で立体を作る:金属の粉末をレーザで溶かして立体を生成する研究です.目的の立体をスライスした形状に薄い断面要素を作りつつ積み重ね,一体化します.この方法は機械加工では製作困難な形状でも生成できますが,これまで素材強度は得られませんでした.本研究では微小領域を完全溶融する造形法を考案しこの問題を解決しました.図1は真空チャンバ内に設置した造形装置で学生が設計製作しました.
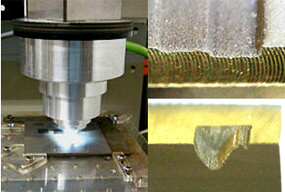
図2 レーザ出力を制御し立体を彫るステンレス(右上) セラミックス(右下)
微小除去による立体形状の創生:高強度材料に形状加工する研究です.セラミックスや高炭素鋼のように,硬く耐久性に優れた材料は切削加工が困難です.しかし数10kWの高パワーレーザを照射すると瞬時に液化やガス化するので,溶け具合を調整して吹き飛ばせば立体形状が得られます.図2は加工の様子とサンプルです.レーザ照射で材料はプラズマ化して発光します.
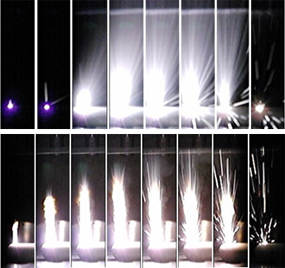
図3 真空中(上)と大気中(下)のレーザ照射と材料の噴出(1コマ1ms)
真空環境におけるレーザ加工:レーザ装置は小型でハイパワー,切断・溶接・熱処理と1台で様々な加工に適用できるなど,宇宙開発でも有望な加工ツールです.しかし大気中とは異なる現象も多く見られます.図3はレーザ照射で発生する溶融材料・プラズマの噴出で,真空中は大気中より数倍も速く30m/sを越えています.このためレンズのダメージも顕著ですが,(特に宇宙用途では) 消耗材(保護用ガス噴射やカバーガラス)を使わない恒久的な対策が急がれます.
(2) レンズシステムに関する研究
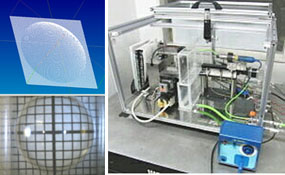
図4 自由曲面レンズ加工装置と凸レンズの加工サンプル(直径10mm)
レーザの強度調整のための自由曲面レンズ:透明な樹脂材料をコンピュータ制御しながら曲面形状に削ることで様々な強度分布を得ることができます.レンズは光を微小領域に集光させるのに適していますが,その後拡散すると中央部が明るく周辺部が暗くなり,均一な強さになりません.そこでビームの強い部分は広げ弱い部分を集中させるようなレンズを作れば,強度分布をかなり自由に調整することができるはずです(例えば丸いビームを四角にする).図4はレンズの設計形状と加工例および当研究室で開発したレンズ加工装置です.
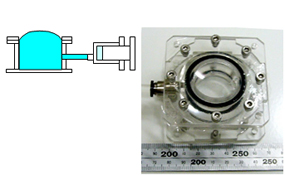
図5 可変焦点の概念(上)と性能評価用試作レンズ(右)
動的変形レンズ:やわらかい素材でレンズを作り,時々刻々変形させピントを調整できるようなレンズシステムの研究です.図5はその模式図で円筒容器に柔軟性に富んだフィルムを貼り付けるだけの構造で,安価でだれでもすぐに作ることができます(レンズ製造設備がいらない).液圧で凸レンズから凹レンズまで形状を変え,焦点を変化させることができます.レンズと駆動機構を一体化しレーザ加工への適用を試みています.
(3) 光応用計測に関する研究
パルスレーザ照射による加工現象の解析:レーザ加工のメカニズムを調べる研究です.金属加工に使うレーザは10ms程度点灯し,直径数100μmの穴をあけます.穴が貫通するまで溶融金属は上方に噴出します.光(レーザ)を当てるだけでなぜ溶融金属が重力に逆らって上方に吹き上げるのでしょうか? この研究では急激な気体の密度変化を図6に示すシュリーレン装置で可視化し,高速度カメラで撮影することでレーザ照射との関係を解析しています.それによるとレーザ照射点では音速に匹敵する爆風が発生し,直径の100倍以上もある火柱とともに断続的に噴出することがわかってきました.
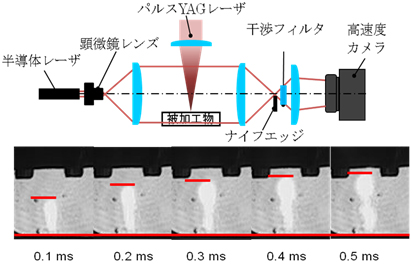
図6 シュリーレン装置(上)とプラズマの噴出(下)
(4) メカトロニクス応用機器の開発
図7 上腕部パワーアシスト機構
機械要素・電子回路・コンピュータ技術を組み合わせるといろいろなシステムを開発することができます.ここでは人間の運動能力を増大させることに応用しています.パワーアシスト機構は骨格(アルミフレーム)・関節(歯車機構)・筋肉(エアシリンダ)・神経系(センサ)・などから構成されています.現在は人の意志の入力方法,滑らかな動作と力を発生させるための工夫(目標は怪力)を検討しています.図7は上腕の模式図です.
![]()